![[ARM] STM32_Radar](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FHtYR1%2FbtsF4Ys7xZr%2FAAAAAAAAAAAAAAAAAAAAAOQcQCHvPR0h1XkYdFCBK9mcXQKRYG0zhd40a_LwU3lp%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1767193199%26allow_ip%3D%26allow_referer%3D%26signature%3DwwBrvrHAzxZ1Q6iXHU4aTRXkHFM%253D)
1. Radar
- Ultrasonic 거리 측정, Servo Motor 동작 구현
- Ultrasonic으로 측정한 거리 UART 출력 및 Python Radar UI 표시(tkinter 사용하여 물체 위치 표시)


(1) TIM1 : servo motor 동작 PWM (Pulse frquency : 50Hz(== Period 20ms))
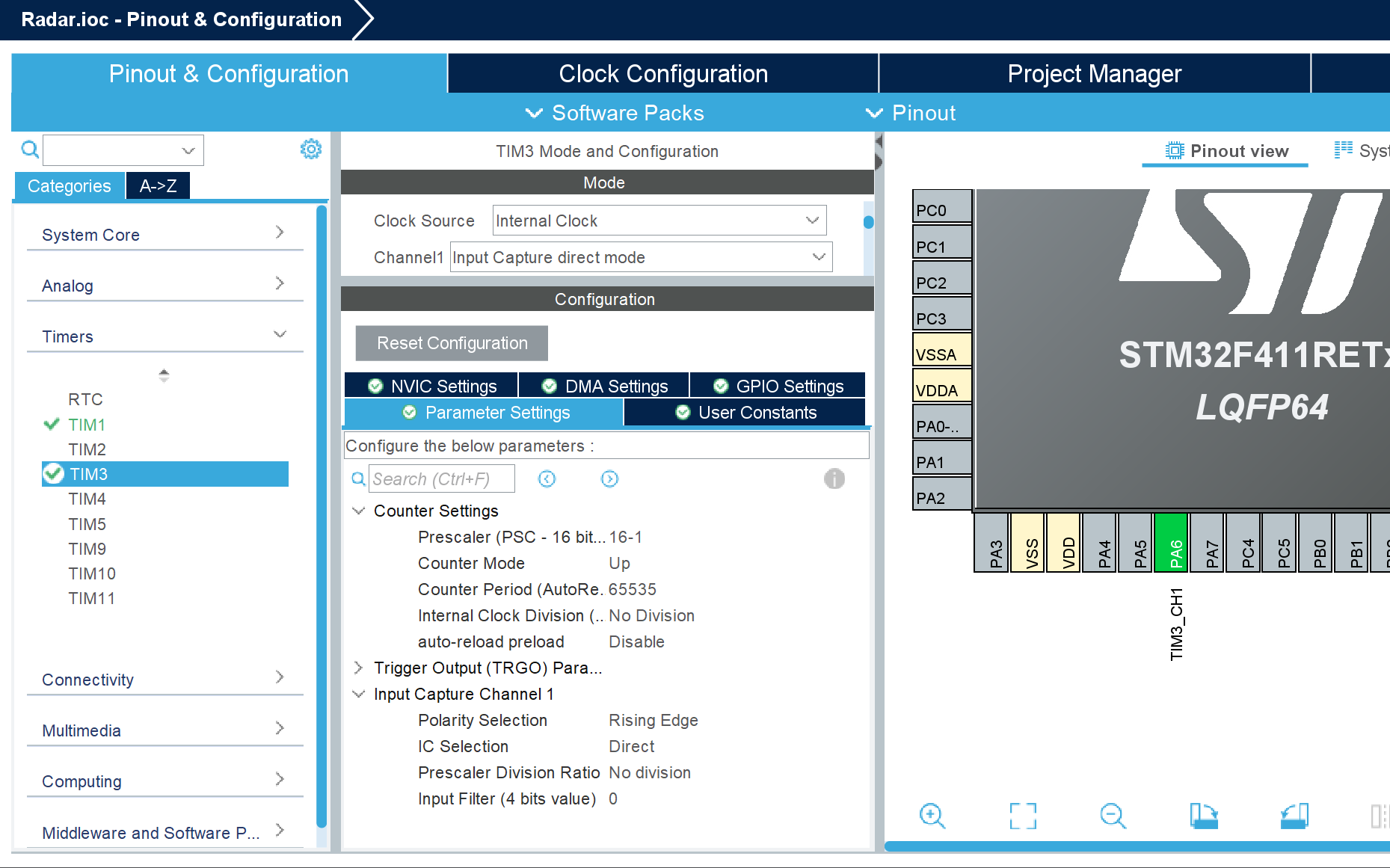
(2) TIM3 : Ultrasonic Input Capture Interrupt TIMER
(3) PA5 : GPIO Trigger, PA6 : TIM3
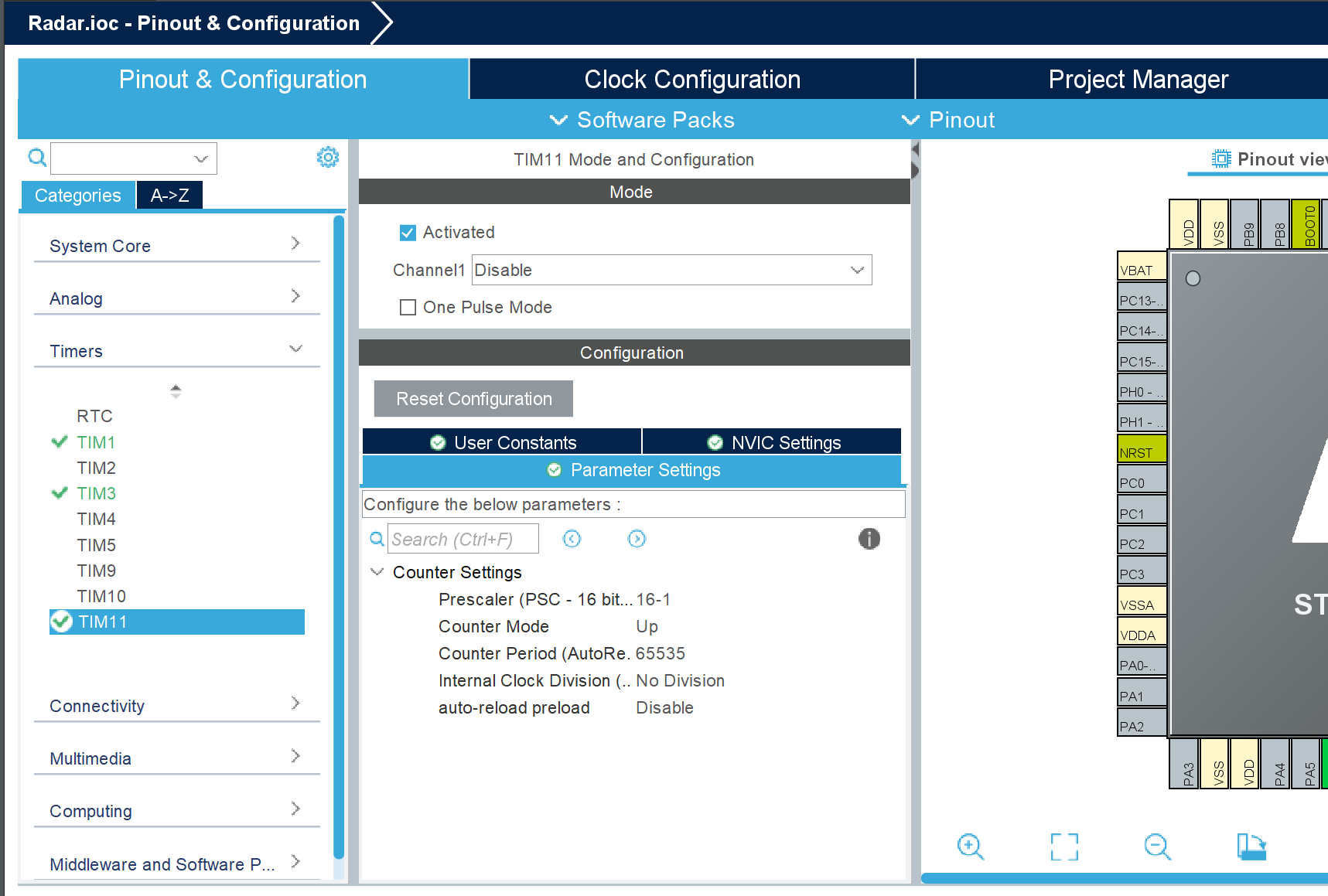
(4) TIM11 : us delay용 TIMER
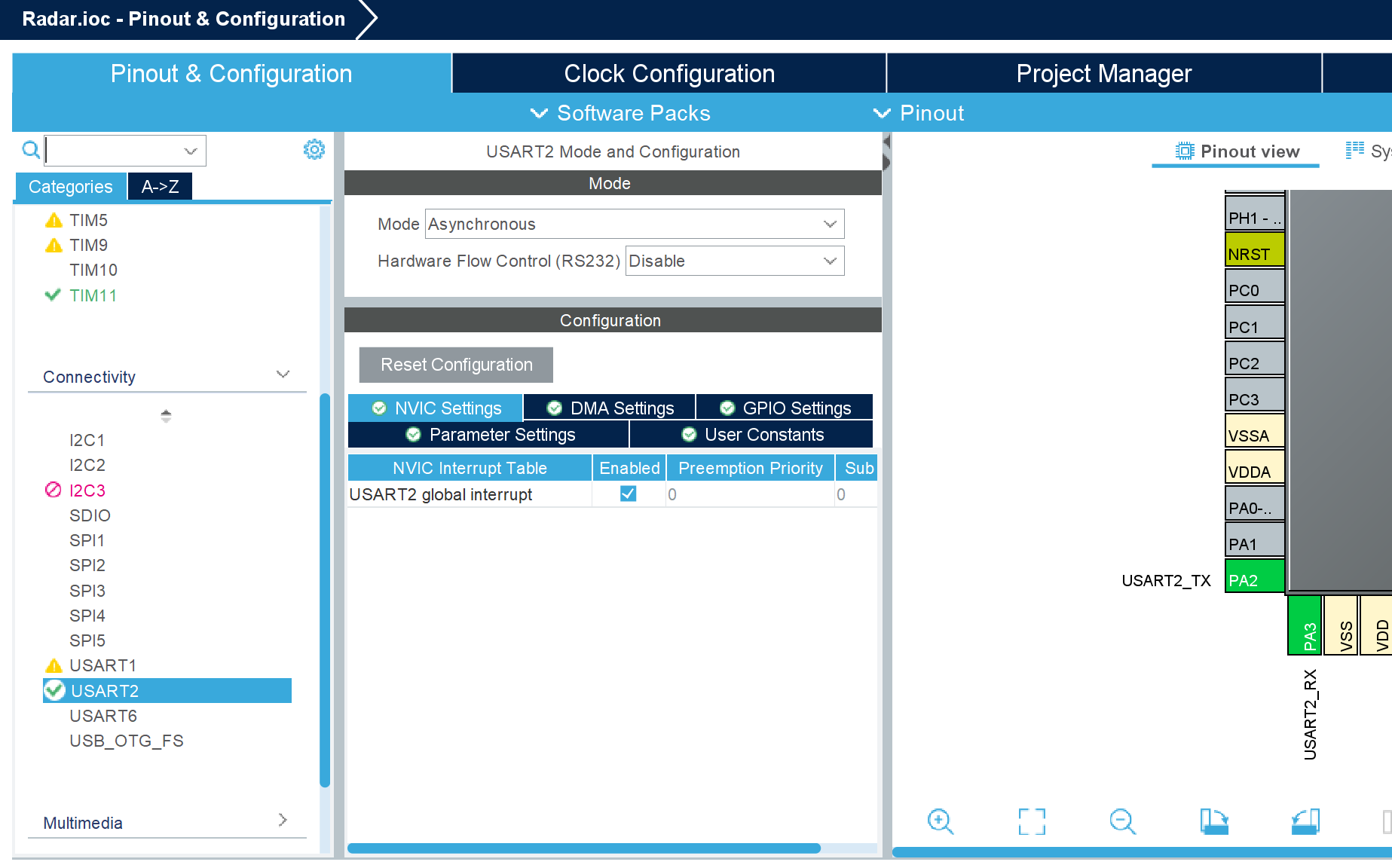
(5) UART2 : Interrupt set
Data(6byte) 통신 protocol : STX CMD data1 data0 CRC ETX
- protocol 송수신 함수 만들기
#define STX 0x02
#define ETX 0x03
typedef struct {
uint8_t command;
uint16_t data;
}protocol_t;
void transmitPacket(protocol_t data);
protocol_t receivePacket();<UART.c 코드>
// packet 송신
void transmitPacket(protocol_t data)
{
/*
* 사전준비
* CRC 계산
* 데이터 전송
* 데이터 전송 완료 대기
*/
// 사전준비
uint8_t txBuffer[] = {STX, 0, 0, 0, 0, ETX};
txBuffer[1] = data.command;
txBuffer[2] = (data.data >> 7) | 0x80; // big endian
txBuffer[3] = (data.data & 0x7f) | 0x80;
// CRC 계산
txBuffer[4] = txBuffer[0] + txBuffer[1] + txBuffer[2] + txBuffer[3];
// 데이터 전송
HAL_UART_Transmit(myHuart, txBuffer, sizeof(txBuffer), 1);
// 데이터 전송 완료 대기
while(HAL_UART_GetState(myHuart) == HAL_UART_STATE_BUSY_TX ||
HAL_UART_GetState(myHuart) == HAL_UART_STATE_BUSY_TX_RX);
// 데이터 전송 중이면 HAL_UART_STATE_BUSY_TX 상태가 반환 됨
// 상태가 HAL_UART_STATE_BUSY_TX 끝날 때까지 while문 반복
}
// packet 수신
protocol_t receivePacket()
{
protocol_t result;
uint8_t buffer[6];
uint8_t count = 0;
uint32_t timeout;
int16_t ch = getChar();
memset(&result, 0, sizeof(buffer)); // result 구조체를 0으로 초기화
if(ch == STX)
{
buffer[count++] = ch;
// STX 수신됐을 때 시간 저장
timeout = HAL_GetTick(); // System Clock timeTick(32bit)
while(ch != ETX)
{
ch = getChar();
if(ch != -1)
buffer[count++] = ch;
//타임 아웃 처리(노이즈로 STX는 들어왔는데 ETX가 안들어왔을 때)
if(HAL_GetTick() - timeout >= 2) return result;
// 2ms 넘으면 result(0 저장되어 있음) 반환
}
// CRC 검사(ETX 정상적으로 수신 됐을 때)
uint8_t crc = 0;
for(int i = 0; i<4; i++)
crc += buffer[i];
if(crc != buffer[4]) return result;
// 수신완료 후 데이터 파싱(parsing)
result.command = buffer[1];
result.data = buffer[3] & 0x7f;
result.data |= (buffer[2] & 0x7f) << 7;
}
return result;
}
코드 리뷰
txBuffer[2] = (data.data >> 7) | 0x80; // big endian
txBuffer[3] = (data.data & 0x7f) | 0x80;data.data = 16bit

⦁ txBuffer[2] = data를 오른쪽으로 7 shift 하고 1000 0000(2) 을 더해줌 → 1110 1110(2)
⦁ txBuffer[3] = (data & 0111 1111(2)) | 1000 0000(2) = 0010 1001(2) | 1000 0000(2) = 1010 1001(2)
→ data의 상위 2비트는 사용 불가 → 사용 가능한 data 범위 : 0 ~ 0011 1111 1111 1111(2) = 0~16383
(Ultrasonic 측정 가능 범위가 20 ~ 150cm이기 때문에 상관 X)
[코드 동작 flow]
`void transmitPacket(protocol_t data)`
- Packet 송신 함수
1. 데이터 통신 프로토콜에 따라 버퍼에 데이터 저장 (STX CMD data1 data0 CRC ETX )
- 16bit data를 8bit(parity bit 1bit + data 7bit)로 쪼개어 저장
- 해당 버퍼에 저장된 data는 parity bit가 더해졌기에 STX, ETX와 구별 가능
2. 버퍼를 UART 전송
`protocol_t receivePacket() `
- Packet 수신 및 반환 함수
1. UART를 통해 문자를 하나 수신하고 해당 문자가 STX인지 검사
2. STX가 맞다면 ETX가 수신될 때까지 데이터를 수신하고 버퍼에 저장
3. 데이터 통신 프로토콜에 따라 데이터가 정상적으로 수신되었는지 검사
- ETX, CRC 검사
- 데이터가 비정상적이면 함수 종료 및 데이터 반환
4. 데이터 파싱 및 구조체 변수에 저장
- data에서 parity bit를 제거하고 저장
5. 구조체 변수 반환
1-1. 정상 작동 중간 점검(UART 이용)
- Data 통신 protocol 함수가 정상 동작하는지 확인
- UART 프로그램으로 protocol에 따라 각도 데이터를 송신하면 Servo Motor가 원하는 각도만큼 동작하는지 확인
- Ultrasonic으로 측정한 거리를 protocol에 따라 UART 전송하고 프로그램으로 데이터 확인
<main.c 코드>
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "UART.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim11;
UART_HandleTypeDef huart2;
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM1_Init(void);
static void MX_TIM3_Init(void);
static void MX_TIM11_Init(void);
static void MX_USART2_UART_Init(void);
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
long map(long x, long in_min, long in_max, long out_min, long out_max) {
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
// delay Function implement using TIMER10(for us delay)
void delayUS(uint16_t time)
{
htim11.Instance->CNT = 0;
while(htim11.Instance->CNT < time);
}
uint32_t IC_Val1 = 0;
uint32_t IC_Val2 = 0;
uint32_t Difference = 0;
uint8_t IsFirstCaptured = 0;
uint32_t Distance = 0;
// ISR function(Input Capture)
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
// If Rising edge occurs, execute the code
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
// Rising edge Interrupt
if(IsFirstCaptured == 0)
{
// Read Timer CNT
IC_Val1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
IsFirstCaptured = 1;
// Next Interrupt -> Falling edge set
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1,
TIM_INPUTCHANNELPOLARITY_FALLING);
}
// Falling edge Interrupt
else if(IsFirstCaptured == 1)
{
// Read Timer CNT
IC_Val2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
htim->Instance->CNT = 0;
if(IC_Val2 > IC_Val1) Difference = IC_Val2 - IC_Val1;
// (IC_Val2 - IC_Val1) mean Ultrasonic transmit and receive time difference
else if(IC_Val1 > IC_Val2) Difference = (0xffff - IC_Val1) + IC_Val2;
// (IC_Val1 > IC_Val2) mean CNT value overflow
// calculate distance
/*
* CLK = 1Mhz -> 1clk = 1us
* distance = velocity*time = 340[m/s]*(CNT/2)[us] = 0.034*CNT/2[cm]
*/
Distance = Difference * 0.034 / 2;
// Next Interrupt -> Rising edge set
IsFirstCaptured = 0;
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1,
TIM_INPUTCHANNELPOLARITY_RISING);
// disable Interrupt
__HAL_TIM_DISABLE_IT(htim, TIM_IT_CC1);
}
}
}
uint32_t getDistance()
{
// Trigger
HAL_GPIO_WritePin(Trigger_GPIO_Port, Trigger_Pin, 1);
delayUS(10);
HAL_GPIO_WritePin(Trigger_GPIO_Port, Trigger_Pin, 0);
// enable Interrupt -> can only occur Interrupt when I want to
__HAL_TIM_ENABLE_IT(&htim3, TIM_IT_CC1);
return Distance;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM3_Init();
MX_TIM11_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
initUart(&huart2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
HAL_TIM_Base_Start(&htim11);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
protocol_t txData, rxData;
rxData = receivePacket();
if(rxData.command == 'R')
{
htim1.Instance->CCR1 = map(rxData.data, 0, 180, 500, 2300);
/*
* long map(long x, long in_min, long in_max, long out_min, long out_max) 함수
* x : mapping 할 data
* in_min : 현재 data 범위의 최소값
* in_max : 현재 data 범위의 최대값
* out_min : mapping 할 범위의 최소값
* out_max : mapping 할 범위의 최대값
* => 현재 데이터의 범위를 바꿔주는(mapping) 함수
*
* 위에서는 0~180(도) 범위의 rxData.data를 500~2300 범위로 변경하여 pulse width 조절
*/
txData.command = 'A';
txData.data = getDistance();
transmitPacket(txData);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
...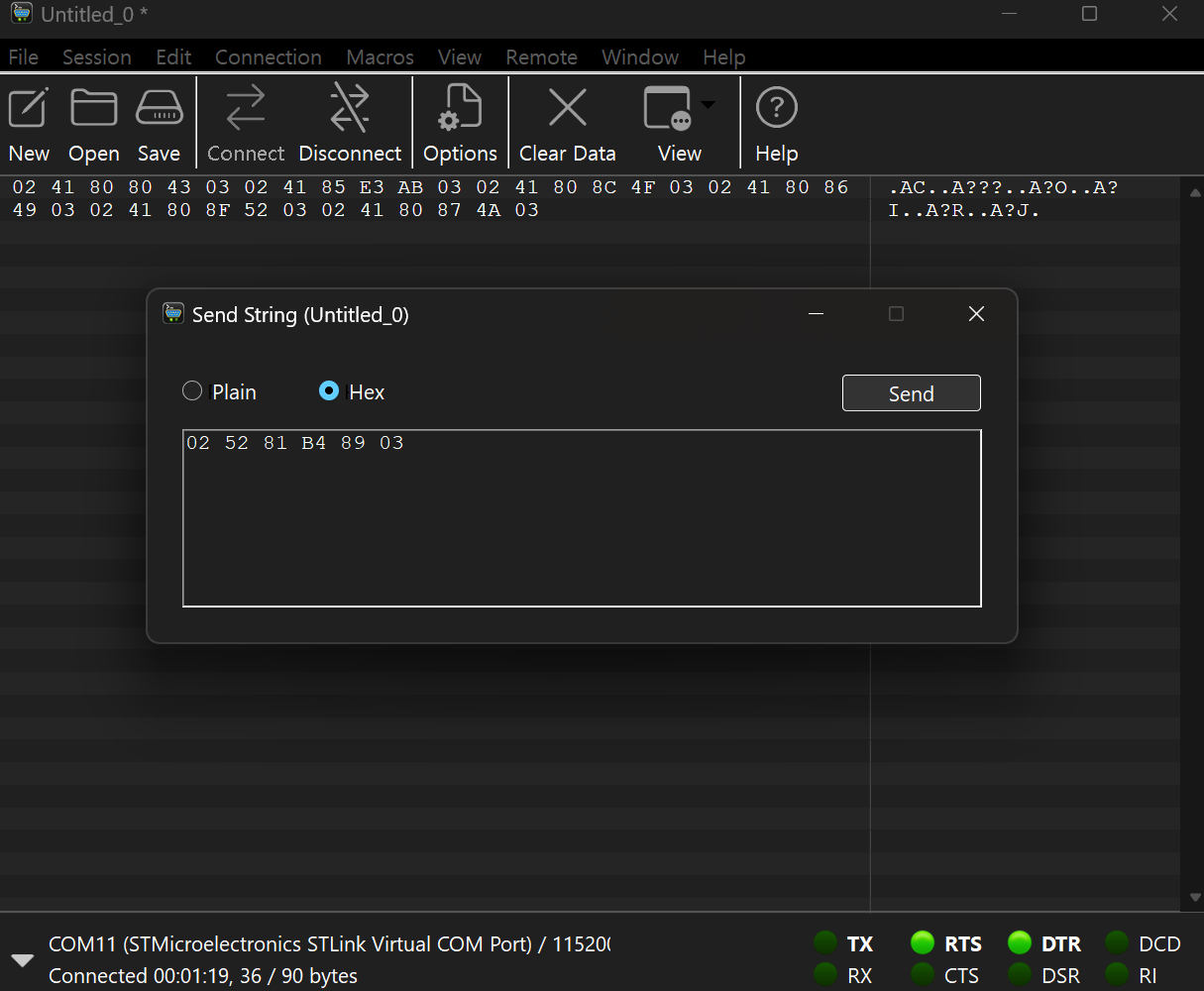
0도 data packet : 02 52 80 80 54 03
90도 data packet : 02 52 80 DA AE 03
175도 data packet : 02 52 81 AF 84 03
175(10) → 1010 1111(2)
data[0] = 1000 0001(2) = 81(16) → MSB = parity bit
data[1] = 1010 1111(2) = AF(16)
⇒ UART로 data 송신하면 servo motor 일정 각도 움직임 + UART에 Ultrasonic data 수신
⦁ 수신 데이터 02 41 80 80 43 03 이라면,
02 03 : STX, ETX
80 80 : Ultrasonic 거리 data
43 : CRC
코드 리뷰
[ARM] STM32_Buzzer, Ulatrasonic, 필터링, ServoMotor
■ LookUPTable 결과값을 미리 저장하고 있는 배열 LUT(LookUPTable) 배열의 인덱스는 입력, 배열의 값은 출력 /* USER CODE BEGIN 0 */ int soundLUT[] = {131, 147, 165, 175, 196, 220, 247, 262}; // LookUPTable ... int main(void) { ..
minba-dev.tistory.com
`void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)` 함수에 대한 설명은 위 블로그 확인
while (1)
{
protocol_t txData, rxData;
rxData = receivePacket();
if(rxData.command == 'R')
{
htim1.Instance->CCR1 = map(rxData.data, 0, 180, 500, 2300);
/*
* long map(long x, long in_min, long in_max, long out_min, long out_max) 함수
* x : mapping 할 data
* in_min : 현재 data 범위의 최소값
* in_max : 현재 data 범위의 최대값
* out_min : mapping 할 범위의 최소값
* out_max : mapping 할 범위의 최대값
* => 현재 데이터의 범위를 바꿔주는(mapping) 함수
*
* 위에서는 0~180(도) 범위의 rxData.data를 500~2300 범위로 변경하여 pulse width 조절
*/
txData.command = 'A';
txData.data = getDistance();
transmitPacket(txData);
}1. UART.c의 `receivePacket()` 함수를 이용하여 UART 프로그램으로 사용자가 보낸 데이터 수신, 저장
- 데이터에는 Command Data와 Degree Data(0~180)가 저장되어 있음
2. 0~180 범위의 Degree Data를 500~2300 범위로 변환하고 CCR에 저장하여 Pulse Width 변경
- Servo Motor 동작 Pulse Width 범위 = 500 ~ 2300
- Degree Data 만큼 Servo Motor 동작
3. `getDistance()` 함수를 이용하여 Ulatrasonic으로 측정한 거리 저장
4. 3에서 측정한 거리를 `transmitPacket()` 함수로 packet하여 UART 송신
1-2. Python_tkinter(UI 표시)
반시계 방향으로 움직이는 막대
import tkinter as tk # UI 라이브러리
import math
WIDTH = 640
HEIGHT = 480
angle = 0
# 개체 호출
root = tk.Tk()
root.title("Ultrasonic Radar")
canvas = tk.Canvas(root, width=WIDTH, height=HEIGHT, bg="black")
canvas.pack()
# 함수 생성
def updateScan():
global angle # 변수 값을 변경해야 해서 global, 참조만 할거면 없어도됨
# 화면 지우기
canvas.delete('all')
angle = angle + 1
if angle > 359:
angle = 0
x = 320 + math.cos(angle * math.pi / 180) * 200
y = 240 - math.sin(angle * math.pi / 180) * 200
"""
cos(degree) = x/radius
x = cos(degree) * radius
sin(degree) = y/radius
y = sin(degree) * radius
cos(x) : -1 ~ +1
cos(x) * 200 : -200 ~ +200
320 + cos(x) * length : +120 ~ +520
-> 막대기의 x축 범위가 120~520
"""
canvas.create_line(320, 240, x, y, fill='red', width=6)
# 320,240 = 중앙값
# 화면 왼쪽 위가 0,0
# x,y가 막대기 끝 점
# 재귀 호출
canvas.after(50, updateScan) # 50ms에 한번씩 update
# 화면 표시
updateScan()
root.mainloop()
레이더처럼 움직이는 막대
import tkinter as tk # UI 라이브러리
import math
WIDTH = 640
HEIGHT = 480
angle = 0
direction = 0
# 개체 호출
root = tk.Tk()
root.title("Ultrasonic Radar")
canvas = tk.Canvas(root, width=WIDTH, height=HEIGHT, bg="black")
canvas.pack()
# 함수 생성
def updateScan():
global angle # 변수 값을 변경해야 해서 global, 참조만 할거면 없어도됨
global direction
# 화면 지우기
canvas.delete('all')
# 레이더 선 그리기
radius = WIDTH / 2
x = radius + math.cos(angle * math.pi / 180) * radius
y = radius - math.sin(angle * math.pi / 180) * radius
canvas.create_line(x, y, radius, radius, fill='green', width=4)
# 각도 업데이트
if direction == 0:
angle += 1
if angle == 181:
direction = 1
else:
angle -= 1
if angle == -1:
direction = 0
# 재귀 호출
canvas.after(10, updateScan) # 10ms에 한번씩 update
# 화면 표시
updateScan()
root.mainloop()
점 찍기
import tkinter as tk # UI 라이브러리
import math
WIDTH = 640
HEIGHT = 480
angle = 0
direction = 0
objects = [[0,0],[10,0],[20,0],[30,0],[40,0],[50,0],[60,0],[70,110],[80,0],
[90,0],[100,0],[110,0],[120,0],[130,0],[140,00],[150,0],[160,0],
[170,150],[180,0]] # 2차원 리스트
# 개체 호출
root = tk.Tk()
root.title("Ultrasonic Radar")
canvas = tk.Canvas(root, width=WIDTH, height=HEIGHT, bg="black")
canvas.pack()
def drawObject(angle, distance):
radius = WIDTH / 2
x = radius + math.cos(angle * math.pi / 180) * distance
y = radius - math.sin(angle * math.pi / 180) * distance
canvas.create_oval(x-5, y-5, x+5, y+5, fill='green') # 사각형 안의 원 그려줌
# 함수 생성
def updateScan():
global angle # 변수 값을 변경해야 해서 global, 참조만 할거면 없어도됨
global direction
global objects
# 화면 지우기
canvas.delete('all')
# 레이더 선 그리기
radius = WIDTH / 2 # 기준점
length = radius
x = radius + math.cos(angle * math.pi / 180) * length
"""
cos(x) : -1 ~ +1
cos(x) * length : -320 ~ +320
radius + cos(x) * length : 0 ~ +640
-> 막대기의 x축 범위가 0~640
"""
y = radius - math.sin(angle * math.pi / 180) * length
canvas.create_line(x, y, radius, radius, fill='green', width=4)
# 물체 그리기
for obj in objects:
drawObject(obj[0], obj[1])
"""
drawObject(0, 1) -> (10, 0) -> (20, 0) ... 리스트 끝날 때까지 반복
"""
# 각도 업데이트
if direction == 0:
angle += 1
if angle == 181:
direction = 1
else:
angle -= 1
if angle == -1:
direction = 0
# 재귀 호출
canvas.after(10, updateScan) # 10ms에 한번씩 update
# 화면 표시
updateScan()
root.mainloop()
Ultrasonic 센서에서 측정한 거리를 점으로 찍기 + Servo Motor가 막대기와 같이 동작
import tkinter as tk # UI 라이브러리
import math
import serial
import time
WIDTH = 640
HEIGHT = 480
angle = 0
direction = 0
objects = [[0,0],[10,0],[20,0],[30,0],[40,0],[50,0],[60,0],[70,0],[80,0],
[90,0],[100,0],[110,0],[120,0],[130,0],[140,0],[150,0],[160,0],
[170,0],[180,0]] # 2차원 리스트
ser = serial.Serial("COM11", 115200)
# 개체 호출
root = tk.Tk()
root.title("Ultrasonic Radar")
canvas = tk.Canvas(root, width=WIDTH, height=HEIGHT, bg="black")
canvas.pack()
def drawObject(angle, distance):
radius = WIDTH / 2
x = radius + math.cos(angle * math.pi / 180) * distance
y = radius - math.sin(angle * math.pi / 180) * distance
canvas.create_oval(x-5, y-5, x+5, y+5, fill='green') # 사각형 안의 원 그려줌
# 함수 생성
def updateScan():
global angle # 변수 값을 변경해야 해서 global, 참조만 할거면 없어도됨
global direction
global objects
global sendingAngle
receiveDistance = 0
#각도 전송(0도 10도 20도... 10도 단위로 Servo Motor 동작)
if angle % 10 == 0: # angle==10 일때만(100ms에 한번씩) 실행
# (리스트 angle 10 단위)
sendingAngle = angle
mask = b'\x7f'
ser.write(bytes(bytearray([0x02, 0x52])))
angleH = (angle >> 7) + 128
angleL = (angle & mask[0]) + 128 # 128==0b1000 0000
crc = (0x02 + 0x52 + angleH + angleL) % 256 # 1byte 범위
ser.write(bytes(bytearray([angleH, angleL, crc, 0x03])))
# 거리 수신
if ser.in_waiting > 0:
data = ser.read()
if data == b'\x02':
# 두번째 바이트 수신대기
timeout = time.time() + 0.002 # 2ms
lostData = False
while ser.in_waiting < 5: # 5글자 대기
# 타임아웃 처리
if time.time() > timeout: # 2ms 넘으면 lost data(=error)
lostData = True
break
if lostData == False:
data = ser.read(5) # CMD ~ ETX (STX는 위에서 검사 했음)
if data[0] == 65:
# CRC 검사
crc = (2 + data[0] + data[1] + data[2]) % 256
if crc == data[3]:
if data[4] == 3: # ETX 검사
# 데이터 파싱
mask = b'\x7f'
data_one = bytes([data[1] & mask[0]])
receiveDistance = int.from_bytes(data_one) << 7
data_one = bytes([data[2] & mask[0]])
receiveDistance += int.from_bytes(data_one)
# 물체 위치(리스트) 업데이트
for obj in objects:
if obj[0] == sendingAngle:
obj[1] = receiveDistance
# 화면 지우기
canvas.delete('all')
# 레이더 선 그리기
radius = WIDTH / 2 # 기준점
length = radius
x = radius + math.cos(angle * math.pi / 180) * length
"""
cos(degree) = x/radius
x = cos(degree) * radius
sin(degree) = y/radius
y = sin(degree) * radius
cos(x) : -1 ~ +1
cos(x) * length : -320 ~ +320
radius + cos(x) * length : 0 ~ +640
-> 막대기의 x축 범위가 0~640
"""
y = radius - math.sin(angle * math.pi / 180) * length
canvas.create_line(x, y, radius, radius, fill='green', width=4)
# 물체 그리기
for obj in objects:
drawObject(obj[0], obj[1])
"""
drawObject(0, 1) -> (10, 0) -> (20, 0) ... 리스트 끝날 때까지 반복
"""
# 각도 업데이트
if direction == 0:
angle += 1
if angle == 181:
direction = 1
else:
angle -= 1
if angle == -1:
direction = 0
# 재귀 호출
canvas.after(10, updateScan) # 10ms에 한번씩 update
# 화면 표시
updateScan()
root.mainloop()

Made By Minseok KIM
'ARM > 1_Study' 카테고리의 다른 글
| [ARM] STM32_RTC, Switch (0) | 2024.04.02 |
|---|---|
| [ARM] STM32_LCD I2C, ADC(polling 방식, DMA 방식), CDS (0) | 2024.03.29 |
| [ARM] STM32_Buzzer, Ulatrasonic, 필터링, ServoMotor (0) | 2024.03.19 |
| [ARM] STM32_TIMER정리, data 전송 flow 구상, PWM(LED, Buzzer) (0) | 2024.03.18 |
| [ARM] STM32_UART 기초 (0) | 2024.03.18 |
Let's Be Happy!
도움이 되었으면 좋겠어요 :)
![[ARM] STM32_RTC, Switch](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FEzImV%2FbtsGhVET6FE%2FAAAAAAAAAAAAAAAAAAAAAMJ_1WVTuoQhXf4Sope7JHaCHdEZ5BHyf2RSLwMjnBfg%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1767193199%26allow_ip%3D%26allow_referer%3D%26signature%3DWBOAqLCKuzf%252B2apaJHaqq6F65Dg%253D)
![[ARM] STM32_LCD I2C, ADC(polling 방식, DMA 방식), CDS](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FnLTTm%2FbtsGefoK3HR%2FAAAAAAAAAAAAAAAAAAAAAH3bh4dfl3484Ic5MMvBvud0UlcU8VQyvDyAsTs6zRSl%2Fimg.jpg%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1767193199%26allow_ip%3D%26allow_referer%3D%26signature%3DZULeaeTujotIawPqy3rHgh%252FZTuo%253D)
![[ARM] STM32_Buzzer, Ulatrasonic, 필터링, ServoMotor](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FbGkj8U%2FbtsGcrYfQv8%2FAAAAAAAAAAAAAAAAAAAAAFNGNJqQQF6eB_TVAtHz7epxxWubiGrXaOhl9OQJ6Icg%2Fimg.jpg%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1767193199%26allow_ip%3D%26allow_referer%3D%26signature%3DVySJSt1UKZPSY5EHzczS5udFk7Q%253D)
![[ARM] STM32_TIMER정리, data 전송 flow 구상, PWM(LED, Buzzer)](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdna%2FcK5Xr5%2FbtsFUGmdhlI%2FAAAAAAAAAAAAAAAAAAAAAEktwDHbJIyAqvZXIxMbgNPO1o_TtHucPk5xM38K0k_L%2Fimg.png%3Fcredential%3DyqXZFxpELC7KVnFOS48ylbz2pIh7yKj8%26expires%3D1767193199%26allow_ip%3D%26allow_referer%3D%26signature%3Dhd1ZMKZQXwGFBjMhdULULuT8bAQ%253D)